Team Voltage History
Explore Team Voltage milestones from founding through modern seasons.
In the Beginning...
Back in 1999, Melbourne High School faced a unique challenge in South Brevard County. Local corporate sponsors were hesitant to support a single school robotics team, citing concerns that it wouldn't adequately benefit the community. To address this, students from various schools across Brevard County, including Melbourne HS, Palm Bay HS, Satellite HS, Eau Gallie HS, and Melbourne Central Catholic HS, banded together to form Team Voltage. Despite the initial hurdles, the team managed to establish itself in time for the 2000 Season and has been actively participating in FIRST ever since.
2025: Reefscape⟶
 In REEFSCAPE presented by Haas, two competing alliances are invited to score coral, harvest algae, and attach to the barge before time runs out.
For more information, click here .
In REEFSCAPE presented by Haas, two competing alliances are invited to score coral, harvest algae, and attach to the barge before time runs out.
For more information, click here .
Tallahassee Regional
Houston Championship
Game Breakdown
2024 Crescendo⟶
 In CRESCENDO presented by Haas, FIRST® Robotics Competition teams will use their engineering skills and creative power to entertain and move the world.
For more information, click here .
In CRESCENDO presented by Haas, FIRST® Robotics Competition teams will use their engineering skills and creative power to entertain and move the world.
For more information, click here .
Tallahassee Regional
Orlando Regional
Game Breakdown
2023 Charged Up⟶
 In CHARGED UP presented by Haas, FIRST ® Robotics Competition teams are inspired to see the potential of energy storage in a new light as they compete to charge up their communities.
For more information, click here .
In CHARGED UP presented by Haas, FIRST ® Robotics Competition teams are inspired to see the potential of energy storage in a new light as they compete to charge up their communities.
For more information, click here .
Orlando Regional
Tallahassee Regional
Game Breakdown
2022 Rapid React⟶
 In RAPID REACT, presented by The Boeing Company, teams must use innovative engineering, creative thinking, and teamwork to reimagine the future of safe, high-speed travel, and lightning-fast deliveries to propel the next evolution of transportation forward in this world and beyond.
For more information, click here .
In RAPID REACT, presented by The Boeing Company, teams must use innovative engineering, creative thinking, and teamwork to reimagine the future of safe, high-speed travel, and lightning-fast deliveries to propel the next evolution of transportation forward in this world and beyond.
For more information, click here .
Tallahassee Regional
Tallahassee Final Match
Orlando Regional
Houston World Championships
Game Breakdown
2021 Infinite Recharge 2⟶
 Teams demonstrate what their robots and drivers can do in a Skills Competition inspired by the INFINITE RECHARGE game.
The Game Design Challenge is an opportunity for teams to design a FIRST Robotics Competition game and compete against other teams for a chance to pitch their game to the FIRST Robotics Competition Game Design Team. Winning game(s), or their elements, may inspire or be used as a future official FIRST Robotics Competition game!
For more information, click here .
Teams demonstrate what their robots and drivers can do in a Skills Competition inspired by the INFINITE RECHARGE game.
The Game Design Challenge is an opportunity for teams to design a FIRST Robotics Competition game and compete against other teams for a chance to pitch their game to the FIRST Robotics Competition Game Design Team. Winning game(s), or their elements, may inspire or be used as a future official FIRST Robotics Competition game!
For more information, click here .
Skills Competition
Game Design Challenge
2020 Infinite Recharge⟶

Game Breakdown
Game Teaser
2020 Season in Pictures
2019 Destination: Deep Space⟶

Game Description
In DESTINATION: DEEP SPACE, Presented By The Boeing Company, we join two competing ALLIANCES collecting samples on Planet Primus. Unpredictable terrain and weather patterns make remote ROBOT operation essential to their mission on the planet. With only 2:30 until liftoff, ALLIANCES must gather as many CARGO pods as possible and prepare their spaceships before the next SANDSTORM arrives. For more information, click here .
Orlando Regional
Orlando Final Match
South Florida
Houston Championship
Game Teaser
Game Breakdown
2018 FIRST Power Up⟶
 The 2018 challenge was based off of old-school arcade games. Both alliances are trapped in the game and must get the highest score and defeat the boss to escape. To do this, teams must maintain control of a scale and switches by stacking on power cubes. These power cubes can also be exchanged for power ups that will help teams gain an advantage over their opponent. Check out the manual here .
The 2018 challenge was based off of old-school arcade games. Both alliances are trapped in the game and must get the highest score and defeat the boss to escape. To do this, teams must maintain control of a scale and switches by stacking on power cubes. These power cubes can also be exchanged for power ups that will help teams gain an advantage over their opponent. Check out the manual here .
Photo Gallery
Teaser and Game Break Down
2017 FIRST STEAMworks⟶
 FIRST ® STEAMWORKS â the 2017 FIRST Robotics Competition game, invites two adventure clubs from an era in which technology relied on steam power to prepare their airships for the ultimate long distance race. More details can be found in the One Page Description.
FIRST ® STEAMWORKS â the 2017 FIRST Robotics Competition game, invites two adventure clubs from an era in which technology relied on steam power to prepare their airships for the ultimate long distance race. More details can be found in the One Page Description.
Photo Album
FIRST STEAMWORKS Game Animation
South Florida Regional Final
Tiebreaker Match Video
2016 FIRST Stronghold⟶
![]()
The Quest
Robots operate independently for first 15 seconds of the Quest. Alliances score points by: - Reaching opponents defenses
- Crossing defenses
- Scoring boulders through goals in the opposing tower Human drivers take control for the final 2 minutes and 15 seconds controlling their robot to: - Defend their castle
- Retrieve boulders
- Defeat defenses
- Score goals from the opponents' courtyard in tower
- Capture and scale the opponent's tower Additional information on this game can be found on the one page game description from FIRST
South Florida Regional
Orlando regional
FIRST Stronghold Game Animation Orlando Regional Match Video - High Score of the Day!
2015 Recycle Rush⟶
 RECYCLE RUSH â is a recycling-themed game played by two Alliances of three robots each. Robots
score points by stacking totes on scoring platforms, capping those stacks with recycling containers, and
properly disposing of pool noodles, representing litter. In keeping with the recycling theme of the game,
all game pieces used are reusable or recyclable by teams in their home locations or by FIRST® at the
end of the season.
Read more about Recycle Rush Photo Album from the South Florida Regional Event 2015 Game Animation South Florida Regional Match 10
RECYCLE RUSH â is a recycling-themed game played by two Alliances of three robots each. Robots
score points by stacking totes on scoring platforms, capping those stacks with recycling containers, and
properly disposing of pool noodles, representing litter. In keeping with the recycling theme of the game,
all game pieces used are reusable or recyclable by teams in their home locations or by FIRST® at the
end of the season.
Read more about Recycle Rush Photo Album from the South Florida Regional Event 2015 Game Animation South Florida Regional Match 10
2014 Aerial Assist⟶
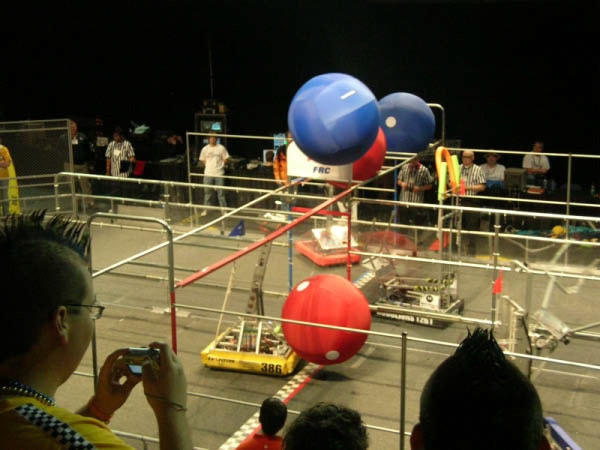
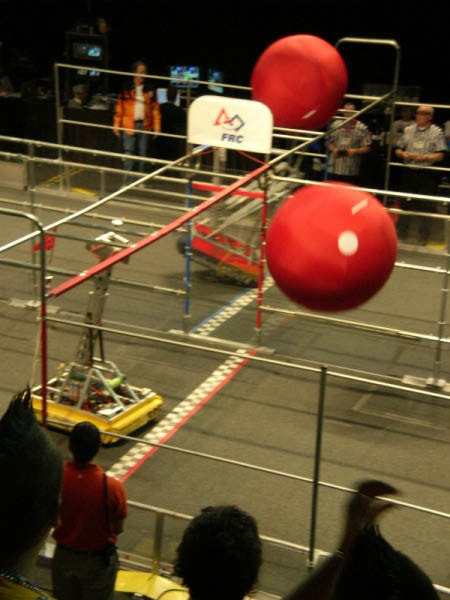
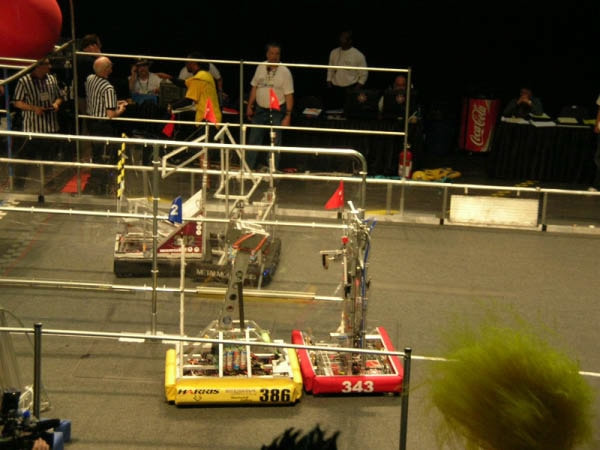
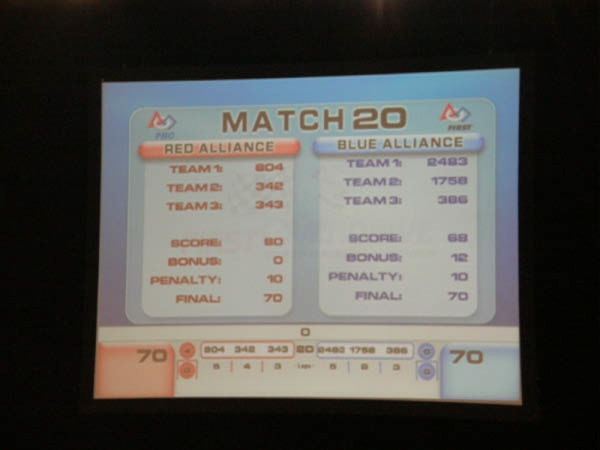
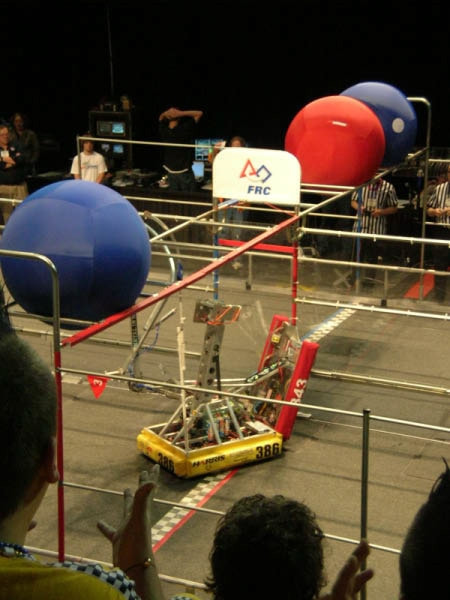
 AERIAL ASSIST is played by two competing Alliances of three robots each on a flat 25' x 54' foot field, straddled by a truss suspended just over five feet above the floor. The objective is to score as many balls in goals as possible during a two (2)-minute and 30-second match. The more Alliances score their ball in their goals, and the more they work together to do it, the more points their Alliance receives.
AERIAL ASSIST is played by two competing Alliances of three robots each on a flat 25' x 54' foot field, straddled by a truss suspended just over five feet above the floor. The objective is to score as many balls in goals as possible during a two (2)-minute and 30-second match. The more Alliances score their ball in their goals, and the more they work together to do it, the more points their Alliance receives.
Click here for the full 2014 Game Description
South Florida Regional
Orlando Regional
2014 Game Animation
Greatest Moments
2013 Ultimate Ascent⟶
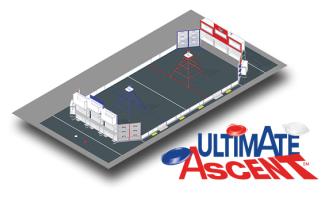 ULTIMATE ASCENT is played by two competing alliances on a flat, 27 x 54 foot field. Each Alliance consists of three robots, and they compete to score as many discs into their goals as they can during a two (2)-minute and fifteen (15)-second match. The higher the goal in which the disc is scored, the more points the Alliance receives. The match begins with a fifteen (15)-second Autonomous Period in which robots operate independently of driver inputs. Discs scored during this period are worth additional points. For the remainder of the match, drivers control robots and try to maximize their alliance score by scoring as many goals as possible. The match ends with robots attempting to climb up pyramids located near the middle of the field. Each robot earns points based on how high it climbs.
Click here for the full 2013 Game Description
ULTIMATE ASCENT is played by two competing alliances on a flat, 27 x 54 foot field. Each Alliance consists of three robots, and they compete to score as many discs into their goals as they can during a two (2)-minute and fifteen (15)-second match. The higher the goal in which the disc is scored, the more points the Alliance receives. The match begins with a fifteen (15)-second Autonomous Period in which robots operate independently of driver inputs. Discs scored during this period are worth additional points. For the remainder of the match, drivers control robots and try to maximize their alliance score by scoring as many goals as possible. The match ends with robots attempting to climb up pyramids located near the middle of the field. Each robot earns points based on how high it climbs.
Click here for the full 2013 Game Description
Photo Gallery
Game Animation
Einstein Finals
2013 Match Videos
2012 Rebound Rumble⟶
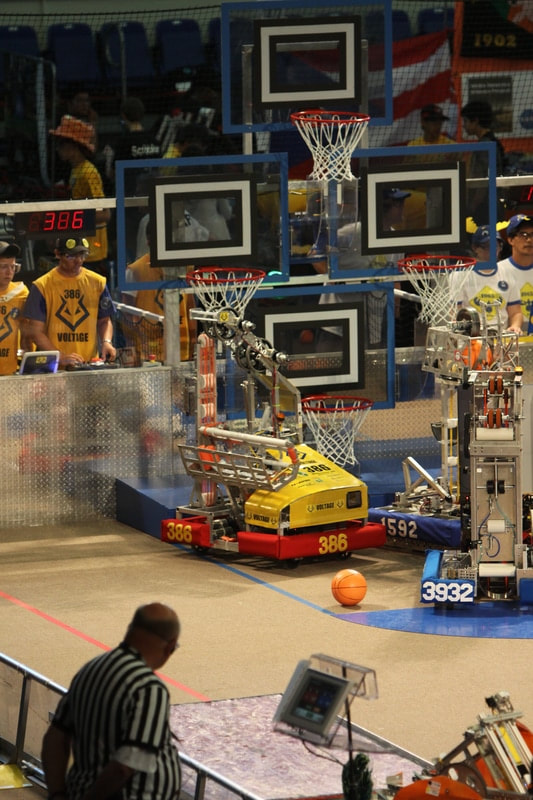
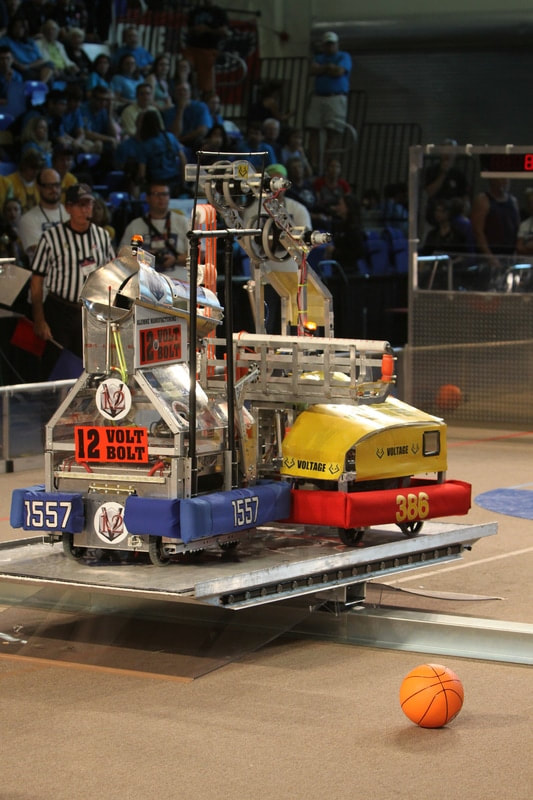
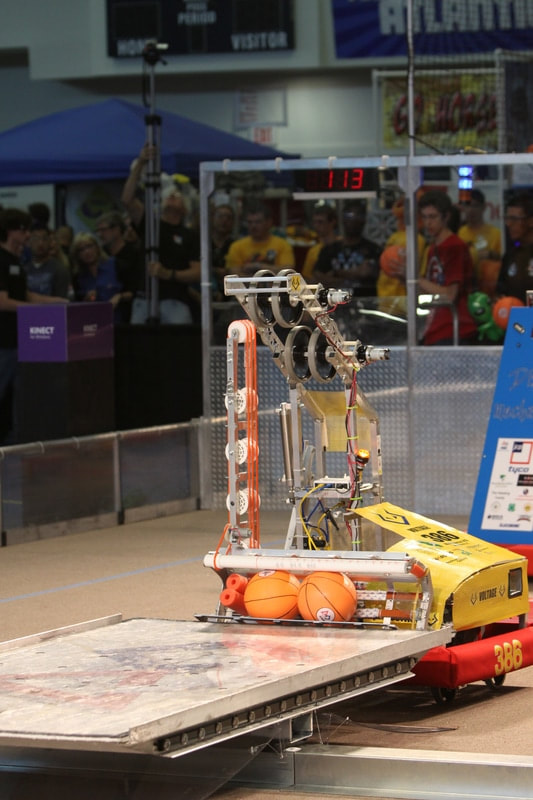
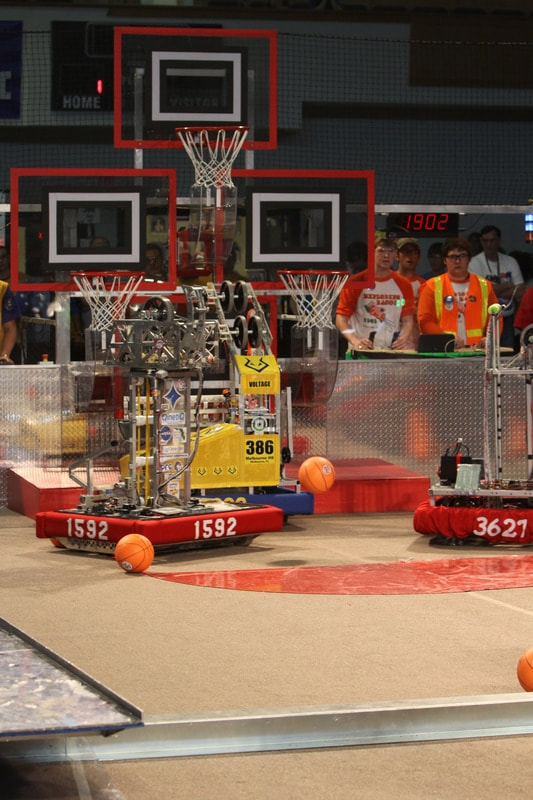
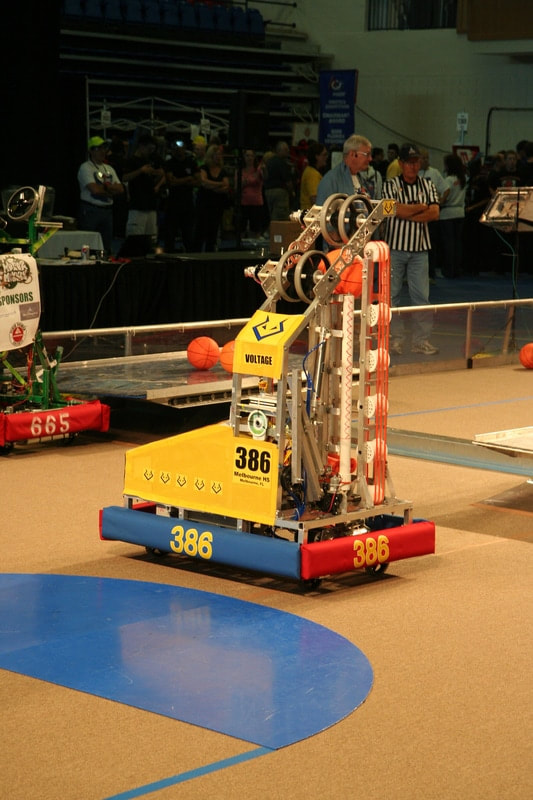
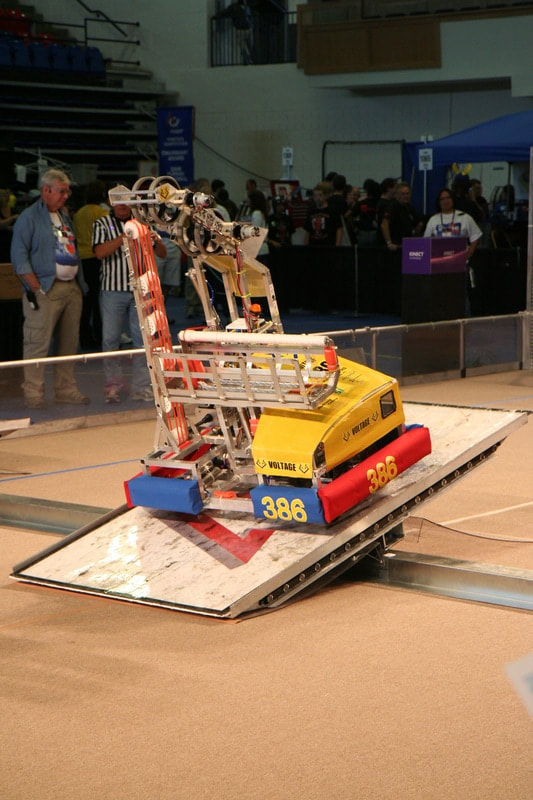
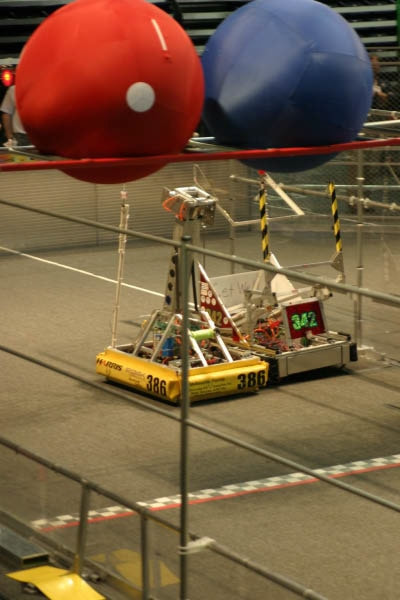
![]() The Rebound Rumbleâ Â Â robotics game is played between two Alliances of three teams each. Each Alliance competes by trying to score as many of the basketballs in the hoops as possible during the 2-minute and 15-second match. Balls scored in higher hoops score Alliances more points. Alliances are awarded bonus points if they are balanced on bridges at the end of the match. In matches where opponent Alliances work together to balance on the white bridge, all participating teams earn additional valuable seeding points.
The Rebound Rumbleâ Â Â robotics game is played between two Alliances of three teams each. Each Alliance competes by trying to score as many of the basketballs in the hoops as possible during the 2-minute and 15-second match. Balls scored in higher hoops score Alliances more points. Alliances are awarded bonus points if they are balanced on bridges at the end of the match. In matches where opponent Alliances work together to balance on the white bridge, all participating teams earn additional valuable seeding points.
Click here for the full 2012 Game Description.
Photo Gallery










































Rebound Rumble Game Animation
Einstein Final Rounds
2012 Match Videos
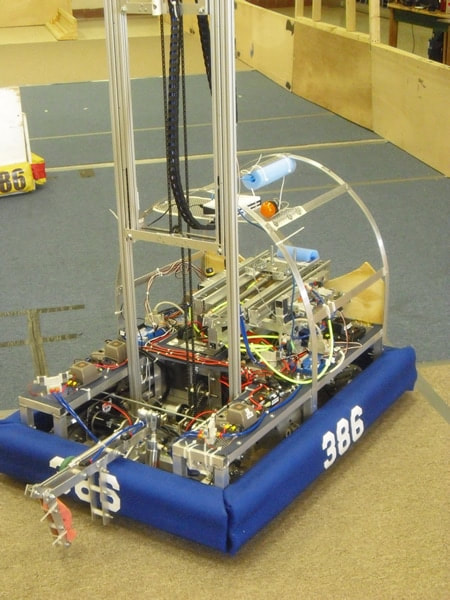
2011 Logomotion⟶
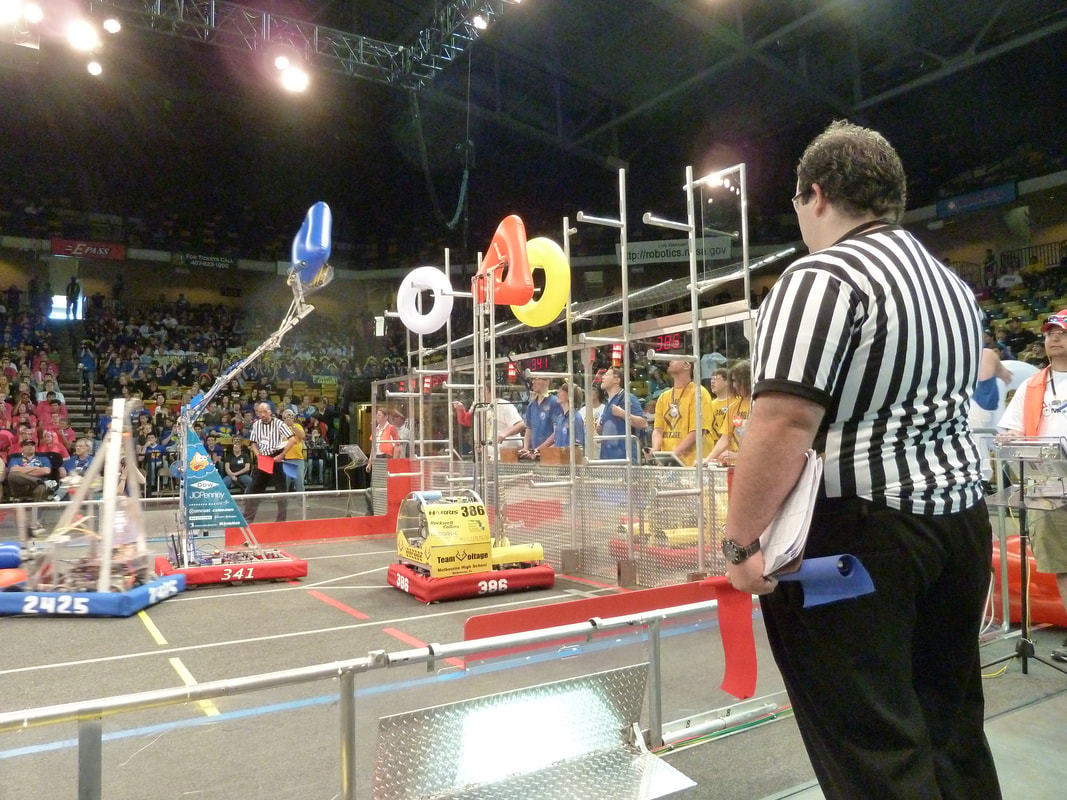
![]() LOGO MOTION⢠is played by two competing alliances on a flat 27' x 54' foot field. Each alliance consists of three robots. They compete to hang as many inflated plastic shapes (triangles, circles, and squares) on their grids as they can during a 2 minute and 15 second match. The higher the teams hang their game pieces on their scoring grid, the more points their alliance receives.
LOGO MOTION⢠is played by two competing alliances on a flat 27' x 54' foot field. Each alliance consists of three robots. They compete to hang as many inflated plastic shapes (triangles, circles, and squares) on their grids as they can during a 2 minute and 15 second match. The higher the teams hang their game pieces on their scoring grid, the more points their alliance receives.
Competition Photo Gallery








Build Season Photo Gallery












Logomotion Game Animation
2010 Breakaway⟶
 Robots play Breakaway on a 27 by 54 foot rectangular field. The field is bordered by a set of guardrails and alliance walls. There are two "bumps" in the field that divide it into three zones. During the game matches, the robots are controlled from alliance stations located outside each end of the field. These rectangular zones consist of three team player stations that provide connectivity between the controls used by the robot operators and the arena. Goals are located at the corners of the field. After balls are scored, human players may pick up the balls and pass them to the center of the alliance station to be placed on the ball return rack and reenter play at midfield.
Robots play Breakaway on a 27 by 54 foot rectangular field. The field is bordered by a set of guardrails and alliance walls. There are two "bumps" in the field that divide it into three zones. During the game matches, the robots are controlled from alliance stations located outside each end of the field. These rectangular zones consist of three team player stations that provide connectivity between the controls used by the robot operators and the arena. Goals are located at the corners of the field. After balls are scored, human players may pick up the balls and pass them to the center of the alliance station to be placed on the ball return rack and reenter play at midfield.
Photo Gallery
















2010 Game Animation
Match Video
2009 Lunacy⟶
 LUNACY is played on a 54' x 27' low friction field. Robots are equipped with slippery wheels and payload trailers. LUNACY game pieces are "Orbit Balls" designated as Moon Rocks, Empty Cells, or super Cells. Two three-team robot alliances collect and score Orbit Balls in trailers attached to the opposing teams' robots. Human players are positioned around the perimeter of the arena and can score from their stations.
LUNACY is played on a 54' x 27' low friction field. Robots are equipped with slippery wheels and payload trailers. LUNACY game pieces are "Orbit Balls" designated as Moon Rocks, Empty Cells, or super Cells. Two three-team robot alliances collect and score Orbit Balls in trailers attached to the opposing teams' robots. Human players are positioned around the perimeter of the arena and can score from their stations.
Awards
 2009 Website Award
2009 Website Award
Photo Gallery































 2009 Game Animation
2009 Game Animation
2009 Match Video
2008 Overdrive⟶
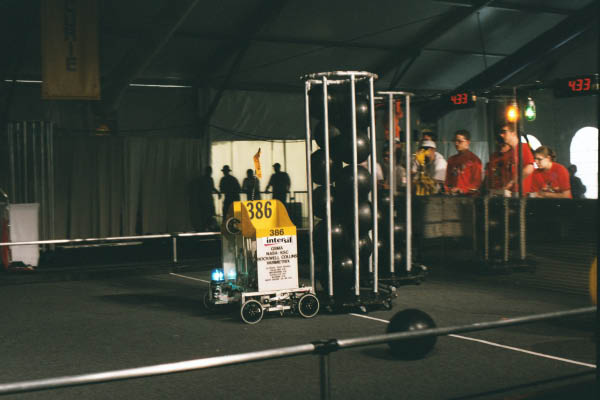
 FIRST Overdrive is a game played on the TRACK. Two ALLIANCES, one red and one blue, composed of three teams each, compete in each MATCH. The object of the game is to attain a higher score than our opponent by making counter-clockwise laps with your robot around the TRACK while moving large TRACKBALLS over and/or under the OVERPASS that bisects the TRACK. For more information about this game, see the Game Manual.
FIRST Overdrive is a game played on the TRACK. Two ALLIANCES, one red and one blue, composed of three teams each, compete in each MATCH. The object of the game is to attain a higher score than our opponent by making counter-clockwise laps with your robot around the TRACK while moving large TRACKBALLS over and/or under the OVERPASS that bisects the TRACK. For more information about this game, see the Game Manual.
Photo Gallery






























Team Voltage Autodesk Animation
Match Video - Crossing 5 lines in Autonomous!
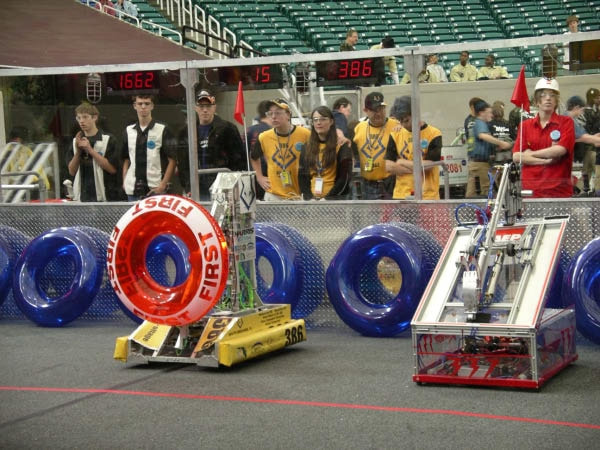
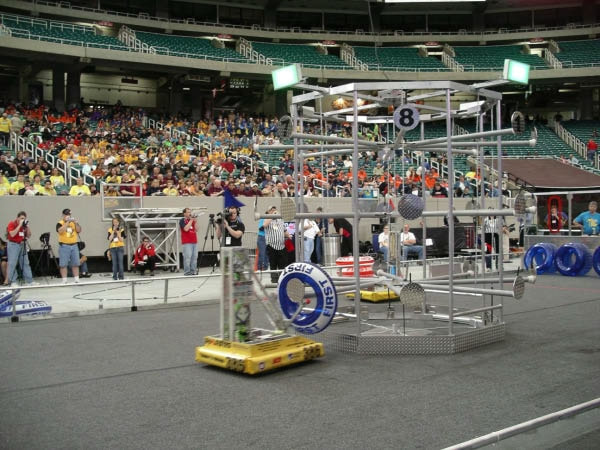
2007 Rack ’n' Roll⟶
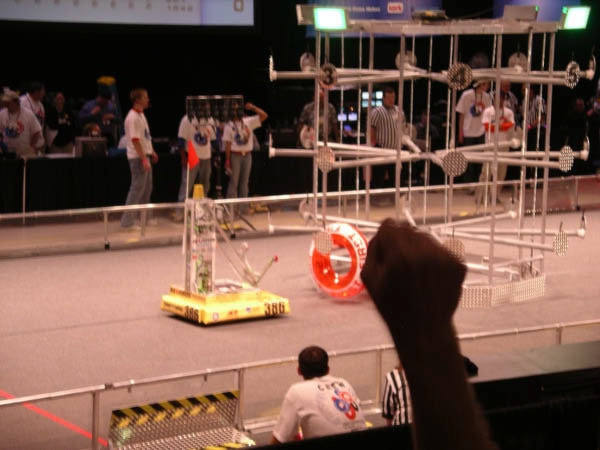
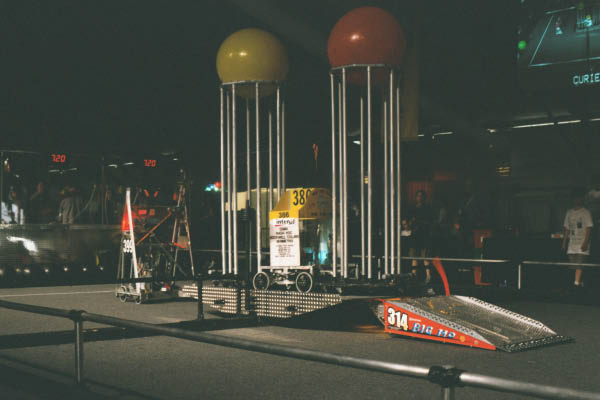
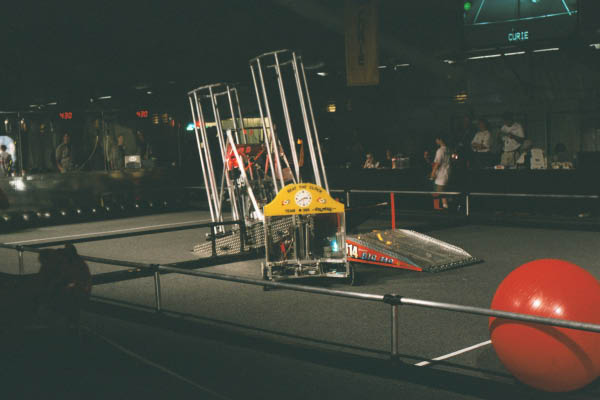
Rack 'n' Roll is a game played on a field as illustrated in the figure below. Two ALLIANCES, one red and one blue, composed of three teams each, compete in each match. The object of the game is to attain a higher score than your opponent ALLIANCE by placing toroidal GAME PIECES (i.e. swimming pool inner tubes) on the central goal structure (the RACK), and/or by having ROBOTS in their HOME ZONE and not in contact with the playing field at the end of the match. Details on the game can be found in the game manual.
Awards
2007 was a great year for Team Voltage. In addition to an innovative design for the Robot, we were also selected to participate in the FIRST Fuel Cell "Green Machine" challenge . Highlights of the game included Research & Development, Building & Testing a Fuel Cell/System, Game Design and Hydrogen Safe Game Floor, and the Insertion of a Fuel Cell System in a Competition Robot.
Our season awards included:
Buckeye Regional FirstFuelCells Founders Award Florida Regional Xerox Creativity Award Florida Regional Finalist Palmetto Regional - Rockwell Automation Innovation in Controls Award Championships Archimedes - Division Finalist #1 Championships - Rockwell Automation Innovation in Control Award
Photo Gallery











2007 Rack'n'Roll Game Animation Video
Team 386 Autodesk Animation
Championships Archimedes Division Q49 Match Video
2006 Aim High⟶
![]() Aim High is played by two alliances, red and blue, each consisting of three robots. During a 10-second autonomous mode robots are programmed to score into any of the three goals: one raised center goal marked by a green vision target and two corner goals at floor level. At the end of the autonomous period the alliance with the most points will gain a 10-point bonus and will be placed on defense for round two. Rounds two, three and four are each 40 seconds long and are human-controlled rounds. Between rounds two and three the alliances switch from offense to defense or vice versa. At the start of round 4 any alliance can score into the corresponding goals. At the end of the match any alliance can receive bonus points by placing its three robots on a platform below the center goal. The alliance with the most points wins with scoring as follows: 3 points for any ball scored in the center goal, 1 point for any ball scored in the corner goals, 10 bonus points for scoring the highest in the autonomous round and 25 points for placing all 3 robots on the platform at the end (10 points for 2 robots and 5 points for 1 robot).
Aim High is played by two alliances, red and blue, each consisting of three robots. During a 10-second autonomous mode robots are programmed to score into any of the three goals: one raised center goal marked by a green vision target and two corner goals at floor level. At the end of the autonomous period the alliance with the most points will gain a 10-point bonus and will be placed on defense for round two. Rounds two, three and four are each 40 seconds long and are human-controlled rounds. Between rounds two and three the alliances switch from offense to defense or vice versa. At the start of round 4 any alliance can score into the corresponding goals. At the end of the match any alliance can receive bonus points by placing its three robots on a platform below the center goal. The alliance with the most points wins with scoring as follows: 3 points for any ball scored in the center goal, 1 point for any ball scored in the corner goals, 10 bonus points for scoring the highest in the autonomous round and 25 points for placing all 3 robots on the platform at the end (10 points for 2 robots and 5 points for 1 robot).
Photo Gallery







Aim High Game Animation Video
Team 386 Autodesk Animation
2006 Judges Award
2005 Triple Play⟶
Two alliances one "red" and one "blue" composed of three teams each compete in each match. The object of the game is to attain a higher score than your opponent alliance by placing tetras on or into goals, getting three goals in a row capped with tetras, and/or having all three robots on an alliance in their end zone at the end of the match.
Photo Gallery








Triple Play Game Animation
Team 386 Autodesk Animation
2005 Match Videos
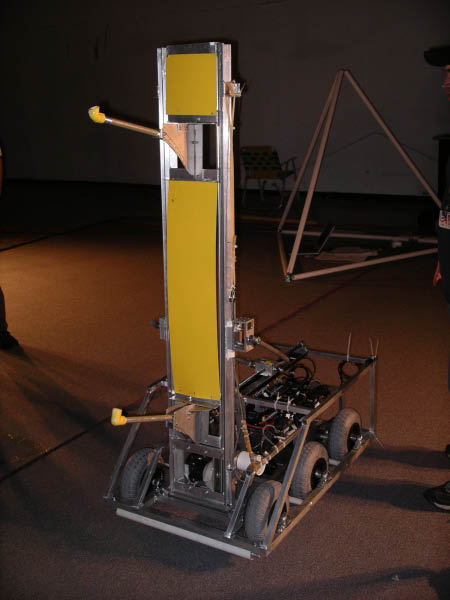
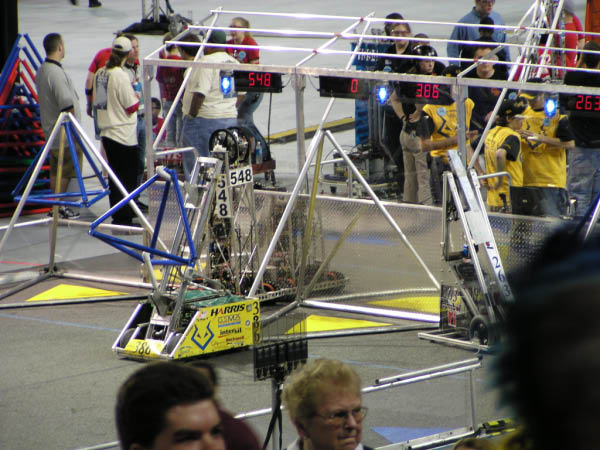
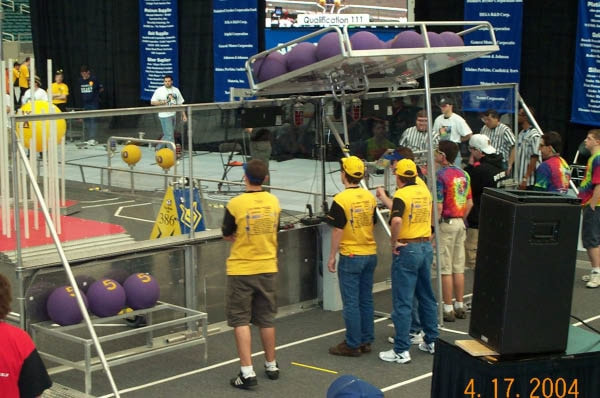
2004 FIRST Frenzy⟶
The object of the game is to attain a higher score than your opponent alliance by delivering balls into goals, capping goals with larger balls, and/or having robots hanging from the Pull-Up Bar at the end of the round of competition. 
Photo Gallery












FIRST Frenzy Game Animation
Team 386 Autodesk Animation
2004 Match Videos
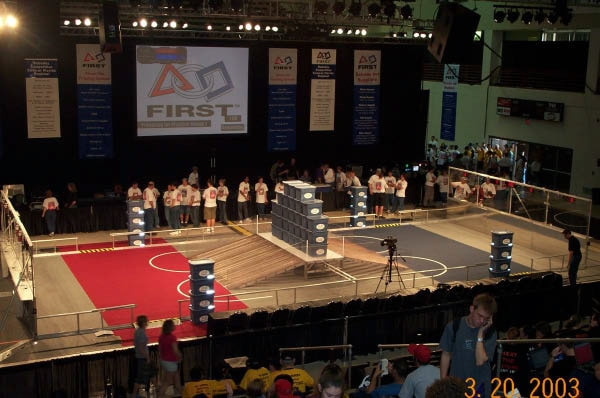
2003 Stack Attack⟶
![]()
The object of the game is to acquire and stack plastic storage containers that are initially located on the platform or placed on the playing field by human players. Each alliance must place containers in a scoring zone on its own side of the field to score points.
Photo Gallery












Stack Attack Game Animation
2003 Game Videos
2002 Zone Zeal⟶
![]()
There are three (3) goals with castered wheels around the bases that may be moved around the playing field. All goals start equally spaced across the center of the playing field. The playing field is broken up into 5 zones.
Photo Gallery






Team 386 Autodesk Animation
2001 Diabolical Dynamics⟶
The playing field is a carpeted, rectangular area. Dividing the field in half is an 18 in (457 mm) high railing with a central bridge, which can tilt to either side of the field or remain level. Two 7 ft (2 m) high movable goals begin on opposite sides of the field. Around the perimeter of the field are two stations for human players, who work with remote controlled robots on the field to score points. At the start of each match, the alliance station contains twenty small balls. An additional twenty small balls and four large balls are located at the far end of the playing field.
The playing field is a carpeted, rectangular area. Dividing the field in half is an 18 in (457 mm) high railing with a central bridge, which can tilt to either side of the field or remain level. Two 7 ft (2 m) high movable goals begin on opposite sides of the field. Around the perimeter of the field are two stations for human players, who work with remote controlled robots on the field to score points. At the start of each match, the alliance station contains twenty small balls. An additional twenty small balls and four large balls are located at the far end of the playing field.
Photo Gallery










Team 386 Autodesk Animation
2000 Co-opertition⟶
![]() The playing field was a carpeted, rectangular area with two 6 ft (2 m) high goals located midfield, one goal for each alliance. There is a 30 in (762 mm) clearance bar under each goal. Between the goals is an 8 ft (2 m) wide ramp with a 5 ft (2 m) clearance bar, which robots may hang on to score points. Around the perimeter of the field are four stations for human players, who work with remote controlled robots on the field to score points. At the start of each match, each alliance station contains seven yellow balls and one black ball. Fifteen yellow balls and two black balls are located at the far end of the playing field.
The playing field was a carpeted, rectangular area with two 6 ft (2 m) high goals located midfield, one goal for each alliance. There is a 30 in (762 mm) clearance bar under each goal. Between the goals is an 8 ft (2 m) wide ramp with a 5 ft (2 m) clearance bar, which robots may hang on to score points. Around the perimeter of the field are four stations for human players, who work with remote controlled robots on the field to score points. At the start of each match, each alliance station contains seven yellow balls and one black ball. Fifteen yellow balls and two black balls are located at the far end of the playing field.



 Our team
Our team